
Cette terminologie semble nous projeter en pleine science fiction et pourtant l’intelligence artificielle (IA) s’est invitée au sein des blocs opératoires depuis quelques années. En chirurgie orthopédique, l’IA était présente comme aide à la décision par les dispositifs de navigation, de réalité augmentée puis d’assistance de coupe. La synergie de ces différents procédés abouti à une véritable assistance numérisée dans la réalisation du geste chirurgical lui même.

Le système d’assistance robotique MAKO/Stryker est constitué du robot lui même, d’une console centralisant les informations et d’un ensemble de capteurs permettant de contrôler la procédure en permanence.

Figure 1 - Système MAKO/Stryker (robot, caméra, console) *
La procédure chirurgicale est sécurisée :
-
Le positionnement des implants est d’abord réalisé virtuellement afin de s’assurer du respect de la cinématique propre à chaque patient
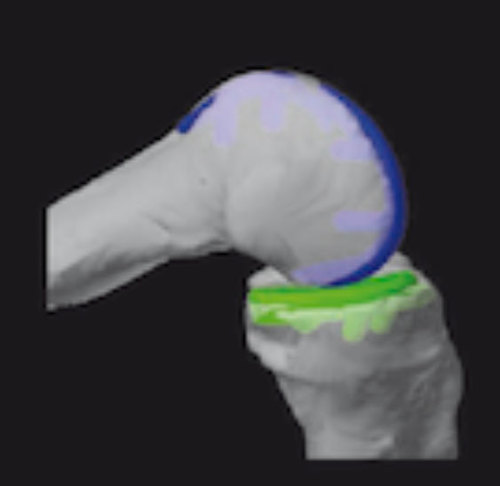
Figure 2 - Aperçu 3D du positionnement d'une PUC*
-
L’assistance robotisée permet la réalisation des coupes osseuses avec une très grande précision vis à vis de la planification réalisée par le chirurgien
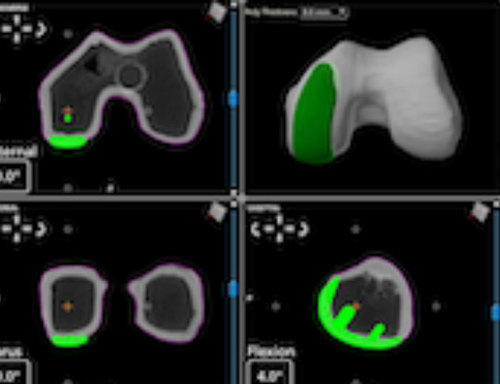
Figure 3 - Visualisation de la taille et du positionnement de l'implant fémoral (PUC)*
- Au delà des valeurs de tolérance, l’assistance robotisée interrompt le processus de coupe
Afin d’aboutir à ce résultat optimisé, différentes étapes sont nécessaires :
En dehors du bloc opératoire (avant l’intervention)
- Acquisition des données anatomiques par la réalisation du scanner pré-opératoire au sein de l’établissement à l’aide d’un dispositif certifié MAKO
- Transfert des données et planification de la taille et du positionnement des implants
Au bloc opératoire (au cours de l’intervention)
-
Mise en place des capteurs permettant de localiser la position du membre. A chaque moment, quel que soit le mouvement imprimé, l’information est transmise au robot assurant la précision de la procédure

Figure 4 - Positionnement des capteurs sur fémur et tibia*
-
Confrontation des données numériques (scanner) et de la réalité par l’acquisition des centres de rotation, de points référents, de la tension des tissus mous autour de l’articulation (ligaments, capsule, tonicité des chaines tendino-musculaires)

Figure 5 - Acuqisition de points référents correspondants à l'anatomie de chaque patient*
-
Positionnement virtuel des implants respectant l’anatomie et la cinématique de chaque patient
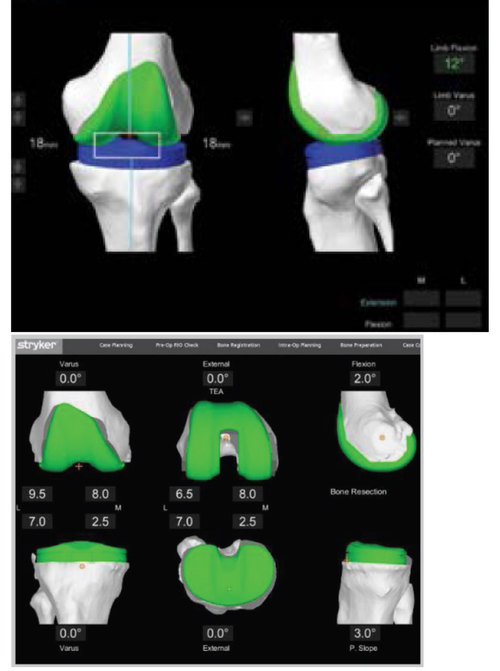
Figure 6 et 6 bis - Réglage virtuel du positionnement des implants d'une PTG et retentissement sur les espaces ainsi constitués*
-
Réalisation des coupes osseuses à l’aide de l’assistance robotisée
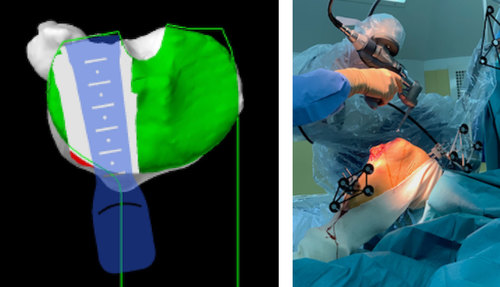
Figure 7 et 7 bis - Réalisation des coupes osseurs à l'aide du bras robotisé*
-
Mise en place des implants
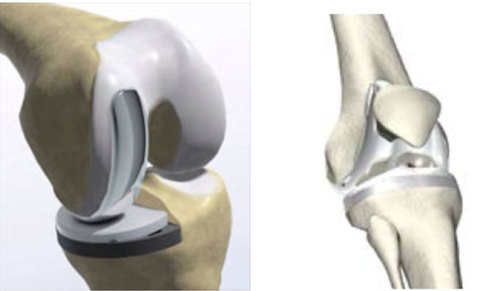
Figure 8 et 8 bis - Implants de prothèse partielle et de prothèse totale genou*
Quels sont les avantages d’une procédure chirurgicale robotisée ?
- Précision numérique de la procédure chirurgicale
- Intégration de l’anatomie propre à chaque patient
- Optimisation du positionnement et de la taille des implants
- Optimisation de l’équilibrage ligamentaire
- Sécurisation du geste chirurgical par le respect exclusif de la planification et l’interruption de la procédure en cas de non respect de cette planification
- Protection des parties molles péri-articulaires
- Optimisation des suites opératoires
- Reproductibilité de la procédure
Quels sont les inconvénients d’une procédure chirurgicale robotisée?
- La disponibilité du robot
- Le process pré-opératoire
- Le cout
Quoique robotisée, il s’agit bien évidemment d’une intervention chirurgicale … Toute intervention chirurgicale présente des risques. Ils sont peu fréquents et le bénéfice escompté de cette intervention est largement supérieur à la probabilité de survenue de complications. Toutefois, afin de vous délivrer une information loyale, il est nécessaire de vous indiquer la possibilité de cette éventualité.